[5 2] resnet 구현
Q1. Batch Normalization 외 다른 Normalization 방법?
1. LayerNorm
1
class torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, bias=True, device=None, dtype=None)
🧩 Layer Normalization (층 정규화)
- Layer Normalization은 입력 미니배치에 대해 정규화를 적용하는 층이야. 즉, 각 샘플(한 배치 안의 한 데이터)에 대해 평균과 분산을 구해 정규화해 주는 방식이야.
⚙️ 수식
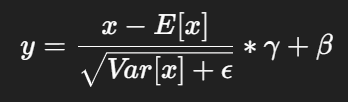
- E[x] : 입력의 평균
- Var[x] : 입력의 분산
- ε (epsilon) : 0으로 나누는 것을 방지하기 위한 작은 상수
- γ (gamma) : 학습 가능한 스케일(가중치)
- β (beta) : 학습 가능한 시프트(편향)
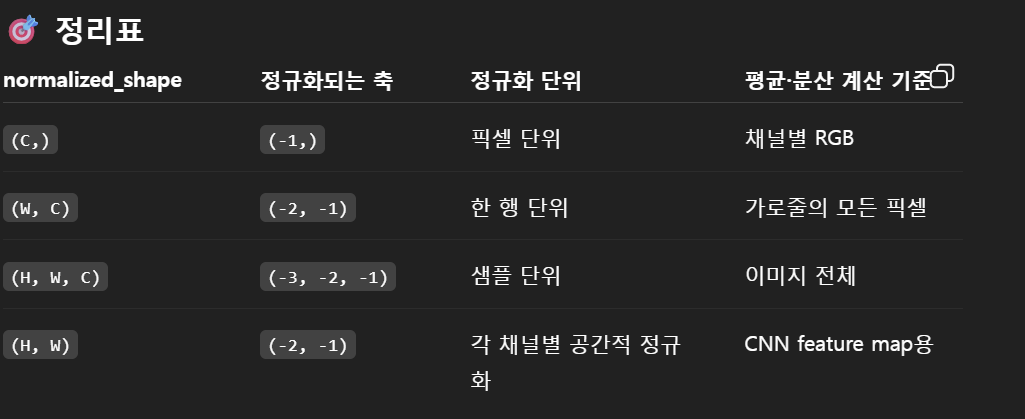
정규화 범위
- normalized_shape에 따라 정규화되는 차원이 결정돼.
- 예를 들어, normalized_shape = (3, 5) 라면 입력 텐서의 마지막 두 차원(-2, -1) 을 기준으로 평균과 분산을 계산해. 즉, input.mean((-2, -1)) 과 같은 연산이 일어나는 거야.
🧠 학습 가능한 파라미터 (γ, β)
- elementwise_affine=True일 경우, γ와 β는 학습 가능한 파라미터가 돼.
- 이때 γ와 β의 크기는 normalized_shape와 동일하고,
- γ는 1로 초기화되고
- β는 0으로 초기화돼.
- 이들은 각 요소(element) 마다 별도로 적용되는 per-element scale, bias야.
🧮 분산 계산
분산은 biased estimator (편향된 추정기)로 계산돼. 즉, torch.var(input, unbiased=False) 와 동일한 방식으로 수행돼
💡 BatchNorm / InstanceNorm 과의 차이점
| 구분 | 정규화 범위 | 학습 파라미터 |
|---|---|---|
| Batch Normalization | 배치 전체 | 채널 단위 |
| Instance Normalization | 각 샘플의 채널별 | 채널 단위 |
| Layer Normalization | 각 샘플의 모든 feature | 요소 단위 |
예시
1
2
3
4
5
6
7
8
9
10
11
12
13
# NLP Example
batch, sentence_length, embedding_dim = 20, 5, 10
embedding = torch.randn(batch, sentence_length, embedding_dim)
layer_norm = nn.LayerNorm(embedding_dim)
# Activate module
layer_norm(embedding)
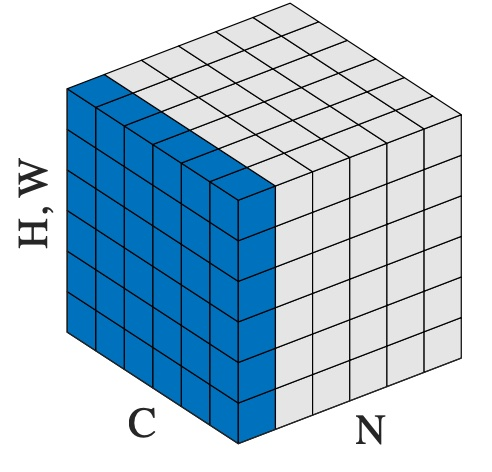
# Image Example
N, C, H, W = 20, 5, 10, 10
input = torch.randn(N, C, H, W)
# Normalize over the last three dimensions (i.e. the channel and spatial dimensions)
# as shown in the image below
layer_norm = nn.LayerNorm([C, H, W])
output = layer_norm(input)
or
1
nn.GroupNorm(1, out_channels)
2. GroupNorm
🧩 1️⃣ 기본 개념
Group Normalization (GN) 은 입력의 채널을 여러 “그룹”으로 나눠서, 각 그룹 안에서 평균과 분산을 계산해 정규화하는 방법이야.
수식은 LayerNorm과 거의 같아. 단, 평균 E[x]와 분산 Var[x]을 “각 그룹별로” 계산한다는 게 핵심 차이야.
⚙️ 2️⃣ 어떻게 그룹을 나누는가?
입력 텐서의 shape:
1
(N, C, H, W)
- N: 배치 크기 (정규화 계산에는 포함 안 됨)
- C: 채널 수 (예: 64)
- H, W: 공간 차원 (이미지의 높이, 너비)
| num_groups | 그룹 구성 | 정규화 범위 |
|---|---|---|
| 1 | 모든 채널이 한 그룹 | LayerNorm과 동일 |
| C | 각 채널이 한 그룹 | InstanceNorm과 동일 |
| 중간 값(예: 32, 8 등) | C를 num_groups로 나눔 | GN 고유 형태 |
🧮 3️⃣ 예시로 보기
- 예를 들어 입력이 (N=2, C=8, H=4, W=4)이고, num_groups=4라면:
- 총 8채널을 4개 그룹으로 나눔 → 그룹당 2채널씩
- 각 그룹 안의 (2 x 4 x 4) 값들로 평균과 분산 계산
- 그걸로 정규화
즉, 각 그룹이 독립적으로 평균 0, 분산 1로 맞춰지는 거야.
📊 4️⃣ BatchNorm / LayerNorm / GroupNorm 비교

3. InstanceNorm
- GroupNorm의 C를 C로 한것!
- 즉 한 sample 당 하나의 channel을 기준으로 정규화
4. RMS(제곱평균제곱근)
핵심 요약
- 수식
- 평균을 빼지 않고 표준편차 대신 RMS로만 스케일링
- γ만 있음(기본적으로 bias/β 없음)
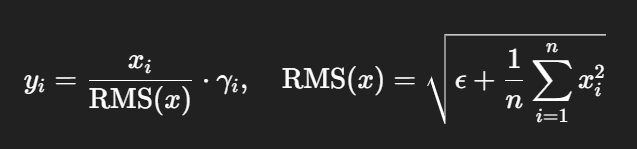
- 정규화 축: normalized_shape의 마지막 D개 차원(=LayerNorm과 동일한 축 선택 방식)
- 장점: 계산 단순(빠름), 안정적, 대형 Transformer/LLM에서 자주 사용(LLaMA류 등)
언제 쓰니?
- Transformer/ViT/MLP 블록의 hidden 차원 정규화에 아주 흔함: nn.RMSNorm(hidden_dim)
- CNN(NCHW)에서는 드뭄(대신 BN/GN/LN 더 흔함). 그래도 쓰려면 축을 맞춰줘야 함(아래 코드 참고).
normalized_shape 이해 (입력 (N, H, W, C) & (N, C, H, W))
- 입력이 (N, *, D)꼴이면 보통 normalized_shape=(D,)로 마지막 차원 기준 정규화
- 예: Transformer 입력 (N, seq_len, hidden_dim) → RMSNorm(hidden_dim)
- 이미지는 PyTorch가 기본 NCHW이므로, 마지막 차원이 채널이 아니기 때문에 바로 쓰면 의도와 다름 → 간단한 래퍼로 NHWC로 바꿔 적용하면 돼
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
class RMSNorm2d(nn.Module):
def __init__(self, num_channels, eps=None, elementwise_affine=True):
super().__init__()
self.norm = nn.RMSNorm(normalized_shape=num_channels, eps=eps, elementwise_affine=elementwise_affine)
def forward(self, x):
x = x.permute(0, 2, 3, 1)
x = self.norm(x)
x = x.permute(0, 3, 1, 2)
return x
# Resnet 블록에서..
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
RMSNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False),
RMSNorm2d(out_channels),
)
...
if stride != 1 or in_channels != out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
RMSNorm2d(out_channels),
)
Q2. ResNet32 구현
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
CIFAR10_MEAN = (0.4914, 0.4822, 0.4465)
CIFAR10_STD = (0.2470, 0.2435, 0.2616)
num_epochs = 80
learning_rate = 0.001
transform = transforms.Compose([
transforms.Pad(4),
transforms.RandomHorizontalFlip(),
transforms.RandomCrop(32),
transforms.ToTensor(),
transforms.Normalize(CIFAR10_MEAN, CIFAR10_STD),
])
test_transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(CIFAR10_MEAN, CIFAR10_STD), # ← 테스트에도
])
train_dataset = torchvision.datasets.CIFAR10(root='../../data/',
train = True,
transform=transform,
download = True)
test_dataset = torchvision.datasets.CIFAR10(root='../../data/',
train = False,
transform = test_transform)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset,
batch_size = 100,
shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset = test_dataset,
batch_size=100,
shuffle=False)
# Basic block
class BasicBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride = 1):
super().__init__()
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1,bias=False),
nn.BatchNorm2d(out_channels), #layernorm일땐 nn.GroupNorm(1, out_channels) / Groupnorm일땐 nn.GroupNorm(32, out_channels) / instancenorm 일때 nn.GroupNorm(out_channels, out_channels)
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride = stride, bias = False),
nn.BatchNorm2d(out_channels),
)
self.relu = nn.ReLU()
def forward(self, x):
x = self.residual_function(x) + self.shortcut(x)
x = self.relu(x)
return x
class ResNet(nn.Module):
def __init__(self, block, num_block, num_classes = 10, init_weight = True):
super().__init__()
self.in_channels = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size = 7, stride = 2, padding = 3, bias = False),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.conv2_x = self._make_layer(block, 64, num_block[0], 1)
self.conv3_x = self._make_layer(block, 128, num_block[1], 2)
self.conv4_x = self._make_layer(block, 256, num_block[2], 2)
self.conv5_x = self._make_layer(block, 512, num_block[3], 2)
self.avg_pool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(512, num_classes)
def _make_layer(self, block, out_channels, num_blocks, stride):
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels
return nn.Sequential(*layers)
def forward(self, x):
output = self.conv1(x)
output = self.conv2_x(output)
x = self.conv3_x(output)
x = self.conv4_x(x)
x = self.conv5_x(x)
x = self.avg_pool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
model = ResNet(BasicBlock, [3,4,6,3]).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.AdamW(model.parameters(), lr=learning_rate)
def update_lr(optimizer, lr):
for param_group in optimizer.param_groups:
param_group['lr'] = lr
total_step = len(train_loader)
curr_lr = learning_rate
model.train()
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 100 == 0:
print("Epoch [{}/{}], step [{}/{}], Loss: {:4f}".format(epoch+1, num_epochs, i+1, total_step, loss.item()))
if (epoch+1) % 20 == 0:
curr_lr /= 3
update_lr(optimizer, curr_lr)
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the odel on the test images: {} %'.format(100*correct/total))
Q3. BottleNeck 이용
- 50층 이상의 ResNet은 매개변수 사용 최소화 위해 이용
- BottleNeck: Conv 1x1을 이용하여 채널 차원 축소 후 Conv3x3을 이용 -> 다시 Conv1x1로 채널 차원을 복원하는 방식으로 동작하는 block
- 참고: [논문 구현]pytorch로 ResNet(2015) 구현하고 학습하기
Bottleneck Design
신경망이 깊어지면 학습하는데 소요되는 시간은 엄청 오래 걸릴 것 입니다. bottleneck design은 다음과 같이 신경망의 복잡도를 감소하기 위해 사용됩니다.
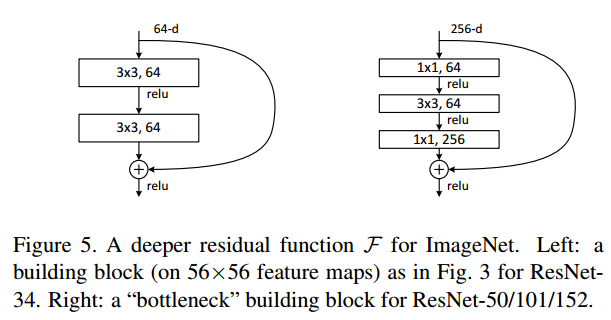
- NIN과 GoogLeNet에서 제안
- 1x1 conv는 신경망의 성능을 감소시키지 않고 파라미터 수를 감소시킵니다.
Code
github.com/weiaicunzai/pytorch-cifar100
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
"""resnet in pytorch
[1] Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun.
Deep Residual Learning for Image Recognition
https://arxiv.org/abs/1512.03385v1
"""
import torch
import torch.nn as nn
class BasicBlock(nn.Module):
"""Basic Block for resnet 18 and resnet 34
"""
#BasicBlock and BottleNeck block
#have different output size
#we use class attribute expansion
#to distinct
expansion = 1
def __init__(self, in_channels, out_channels, stride=1):
super().__init__()
#residual function
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * BasicBlock.expansion, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
#shortcut
self.shortcut = nn.Sequential()
#the shortcut output dimension is not the same with residual function
#use 1*1 convolution to match the dimension
if stride != 1 or in_channels != BasicBlock.expansion * out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * BasicBlock.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class BottleNeck(nn.Module):
"""Residual block for resnet over 50 layers
"""
expansion = 4
def __init__(self, in_channels, out_channels, stride=1):
super().__init__()
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, stride=stride, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * BottleNeck.expansion, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels * BottleNeck.expansion),
)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels * BottleNeck.expansion:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * BottleNeck.expansion, stride=stride, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels * BottleNeck.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class ResNet(nn.Module):
def __init__(self, block, num_block, num_classes=100):
super().__init__()
self.in_channels = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True))
#we use a different inputsize than the original paper
#so conv2_x's stride is 1
self.conv2_x = self._make_layer(block, 64, num_block[0], 1)
self.conv3_x = self._make_layer(block, 128, num_block[1], 2)
self.conv4_x = self._make_layer(block, 256, num_block[2], 2)
self.conv5_x = self._make_layer(block, 512, num_block[3], 2)
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
def _make_layer(self, block, out_channels, num_blocks, stride):
"""make resnet layers(by layer i didnt mean this 'layer' was the
same as a neuron netowork layer, ex. conv layer), one layer may
contain more than one residual block
Args:
block: block type, basic block or bottle neck block
out_channels: output depth channel number of this layer
num_blocks: how many blocks per layer
stride: the stride of the first block of this layer
Return:
return a resnet layer
"""
# we have num_block blocks per layer, the first block
# could be 1 or 2, other blocks would always be 1
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
output = self.conv1(x)
output = self.conv2_x(output)
output = self.conv3_x(output)
output = self.conv4_x(output)
output = self.conv5_x(output)
output = self.avg_pool(output)
output = output.view(output.size(0), -1)
output = self.fc(output)
return output
def resnet18():
""" return a ResNet 18 object
"""
return ResNet(BasicBlock, [2, 2, 2, 2])
def resnet34():
""" return a ResNet 34 object
"""
return ResNet(BasicBlock, [3, 4, 6, 3])
def resnet50():
""" return a ResNet 50 object
"""
return ResNet(BottleNeck, [3, 4, 6, 3])
def resnet101():
""" return a ResNet 101 object
"""
return ResNet(BottleNeck, [3, 4, 23, 3])
def resnet152():
""" return a ResNet 152 object
"""
return ResNet(BottleNeck, [3, 8, 36, 3])
Q4. 학습 가중치 초기화 (Xavier_normal 방법, kaiming_normal 방법)
📌 왜 초기화가 중요할까?
- 신경망 학습 초기에 가중치 분포가 너무 크거나 작으면
➜ 기울기 소실(vanishing) 또는 기울기 폭발(exploding) 발생 - 적절한 초기화는 입력/출력 variance를 일정하게 유지 → 안정적인 학습
PyTorch에서는 이런 초기화 전략을 쉽게 쓸 수 있게 torch.nn.init 모듈을 제공합니다. 모든 함수는 torch.no_grad() 모드에서 실행돼서 autograd에 기록되지 않아요.
🔹 주요 초기화 함수 요약
| 함수 | 역할 | 수식 / 특징 | | ——————————————– | ———————————– | ———————————————————— | | nn.init.constant_ | 텐서를 특정 상수 값으로 채움 | tensor[:] = val | | nn.init.ones_, nn.init.zeros_ | 1 또는 0으로 채움 | bias를 0으로 초기화할 때 자주 사용 | | nn.init.uniform_(a, b) | 균등분포 U(a, b)에서 샘플링 | 예: U(-0.1, 0.1) | | nn.init.normal_(mean, std) | 정규분포 N(mean, std²)에서 샘플링 | 예: N(0, 0.01) | | nn.init.trunc_normal_(mean, std, a, b) | 절단 정규분포 (값이 [a,b] 범위 안에만) | transformer 계열에서 자주 사용 | | nn.init.eye_ | 항등 행렬(I) 로 초기화 | Linear layer에 가끔 사용 | | nn.init.dirac_ | Conv 레이어에서 입력=출력 채널 연결 유지 | ID 매핑 효과 | | nn.init.sparse_ | 텐서를 희소 행렬(sparse) 로 초기화 | 각 column에 일부 값만 N(0, std²)로 채움 | | nn.init.orthogonal_ | 가중치를 직교행렬로 초기화 | 출력 간 상관관계 최소화 | | nn.init.xavier_uniform_ | Glorot uniform, 입출력 variance 균형 | U(-a, a) where a = gain * sqrt(6/(fan_in + fan_out)) | | nn.init.xavier_normal_ | Glorot normal | N(0, std²) where std = gain * sqrt(2/(fan_in + fan_out)) | | nn.init.kaiming_uniform_ | He uniform (ReLU용) | U(-bound, bound) with bound = gain * sqrt(3/fan_in) | | nn.init.kaiming_normal_ | He normal (ReLU용) | N(0, std²) where std = gain / sqrt(fan_in) | | nn.init.calculate_gain() | 활성함수별 gain (스케일링 상수) 계산 | 예: ReLU=√2, Tanh=5/3, LeakyReLU=√(2/(1+α²)) |
⚙️ calculate_gain() 자세히 보기
활성 함수별로 입력 분산을 유지하려면 gain(보정 계수)이 달라집니다.
| 비선형 함수 | gain 값 | 비고 |
|---|---|---|
'linear' / 'conv2d' | 1 | 기본 |
'sigmoid' | 1 | |
'tanh' | 5/3 ≈ 1.6667 | |
'relu' | √2 ≈ 1.414 | He 초기화의 핵심 |
'leaky_relu' | √(2/(1+α²)) | α=0.01이면 ≈1.414 |
'selu' | 3/4 | 하지만 self-normalizing에서는 linear 권장 |
1
2
3
gain = nn.init.calculate_gain('relu')
w = torch.empty(64, 3, 3, 3)
nn.init.xavier_uniform_(w, gain=gain)
Xavier_normal 방법
- 논문: Glorot & Bengio (2010)
- 목표: 입출력 variance 동일하게 유지
- 적용: Sigmoid, Tanh 계열. ReLU에는 Kaiming이 더 적합.
- 공식:
1
nn.init.xavier_uniform_(layer.weight, gain=nn.init.calculate_gain('relu'))
⚡ Kaiming (He) 초기화
- 논문: He et al., 2015
- 목표: ReLU 함수에서 입력 분산 보존
- 공식:
- 두 버전 있음:
- kaiming_uniform_: U(-bound, bound)
- kaiming_normal_: N(0, std²)
1
nn.init.kaiming_normal_(conv.weight, mode='fan_out', nonlinearity='relu')
1) mode가 뭐냐?
Kaiming(He) 초기화에서 분산을 어디에서 보존할지를 고르는 옵션이야.
- mode=’fan_in’ → 순전파(forward) 에서 분산 보존 (가장 흔함, 기본값)
- mode=’fan_out’ → 역전파(backward) 에서 분산 보존
대부분 ReLU 계열 네트워크에선 fan_in 을 씀. 특정 이유(예: Deconv/특정 아키텍처의 안정성)를 위해 역전파 분산 보존이 필요하면 fan_out.
2) kaiming_uniform_의 bound와 kaiming_normal_의 std
Kaiming 초기화의 목표: ReLU/LeakyReLU 같은 비대칭 활성화에서도 신호 분산이 층을 지나며 유지되도록 가중치 분포를 설정.
👉 kaiming_uniform_의 bound 와 kaiming_normal_의 std 는 레이어의 fan 값과 활성함수에 맞춘 가중치 분포의 스케일일 뿐이고, BatchNorm/LayerNorm과는 무관해! (정규화 레이어 종류와 상관없이 “가중치 초기 분포”를 정하는 파라미터야.)
🧮 fan_in / fan_out 이란?
| 용어 | 의미 |
|---|---|
fan_in | 입력 feature 수 (입력 채널 × 커널 크기) |
fan_out | 출력 feature 수 (출력 채널 × 커널 크기) |
- 예: Conv2d(64, 128, kernel_size=3)
→ fan_in = 64×3×3, fan_out = 128×3×3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
import torch.nn as nn
class MyNet(nn.Module):
def __init__(self):
super().__init__()
self.conv = nn.Conv2d(3, 64, 3, padding=1)
self.fc = nn.Linear(64*32*32, 10)
self.init_weights()
def init_weights(self):
nn.init.kaiming_normal_(self.conv.weight, mode='fan_out', nonlinearity='relu')
nn.init.constant_(self.conv.bias, 0)
nn.init.xavier_uniform_(self.fc.weight, gain=nn.init.calculate_gain('relu'))
nn.init.zeros_(self.fc.bias)
정리
| 카테고리 | 대표 함수 | 주 용도 |
|---|---|---|
| 상수 초기화 | constant_, zeros_, ones_ | bias 또는 실험용 |
| 확률적 초기화 | uniform_, normal_, trunc_normal_ | 임의 분포로 초기화 |
| 선형 보존형 | eye_, dirac_ | 항등 또는 ID 매핑 보존 |
| 정규화 계열 | xavier_*, kaiming_* | 대부분의 CNN / MLP 기본 |
| 특수 목적 | orthogonal_, sparse_ | 직교성, 희소성 부여 |